Adafruit STEMMA QT / Qwiic 9-DOF IMU Fusion Breakout BNO055 - Sonstige Elektroinstallationsartikel mit integriertem 9-DOF-Sensor für präzise 3D-Raumorientierung und einfache Sensorfusion, ideal für anspruchsvolle Projekte.
- Hersteller: Adafruit
Preisvergleich ab 32,95 € bis 40,50 €
-
Bestes Angebot

Adafruit STEMMA QT / Qwiic - 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055
Wenn Sie jemals einen 9-DOF-Sensor bestellt und verdrahtet haben, haben Sie wahrscheinlich auch die Herausforderung erkannt, die Sensordaten von Beschleunigungsmesser, Gyroskop und Magnetometer in tatsächliche 3D-Raumorientierung umzuwandeln! Die Orientierung ist ein schwer zu lösendes Problem. Die Algorithmen für die Sensorfusion (die geheime Soße, die die Daten von Beschleunigungsmesser, Magnetometer und Gyroskop zu einer stabilen dreiachsigen Orientierungsausgabe zusammenführt) können sehr schwierig sein, wenn man sie richtig hinbekommt und auf kostengünstigen Echtzeitsystemen implementiert. Bosch ist das erste Unternehmen, das dieses Problem in den Griff bekommen hat, indem es einen MEMS-Beschleunigungssensor, einen Magnetometer und ein Gyroskop auf einem einzigen Chip zusammen mit einem ARM Cortex-M0-basierten Hochgeschwindigkeitsprozessor untergebracht hat, der alle Sensordaten verdaut, die Sensorfusion und die

32,95 €
zzgl. 4,95 € VersandAdafruit STEMMA QT / Qwiic - 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055
Wenn Sie jemals einen 9-DOF-Sensor bestellt und verdrahtet haben, haben Sie wahrscheinlich auch die Herausforderung erkannt, die Sensordaten von Beschleunigungsmesser, Gyroskop und Magnetometer in tatsächliche 3D-Raumorientierung umzuwandeln! Die Orientierung ist ein schwer zu lösendes Problem. Die Algorithmen für die Sensorfusion (die geheime Soße, die die Daten von Beschleunigungsmesser, Magnetometer und Gyroskop zu einer stabilen dreiachsigen Orientierungsausgabe zusammenführt) können sehr schwierig sein, wenn man sie richtig hinbekommt und auf kostengünstigen Echtzeitsystemen implementiert. Bosch ist das erste Unternehmen, das dieses Problem in den Griff bekommen hat, indem es einen MEMS-Beschleunigungssensor, einen Magnetometer und ein Gyroskop auf einem einzigen Chip zusammen mit einem ARM Cortex-M0-basierten Hochgeschwindigkeitsprozessor untergebracht hat, der alle Sensordaten verdaut, die Sensorfusion und die
-

Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055 STEMMA QT Qwiic
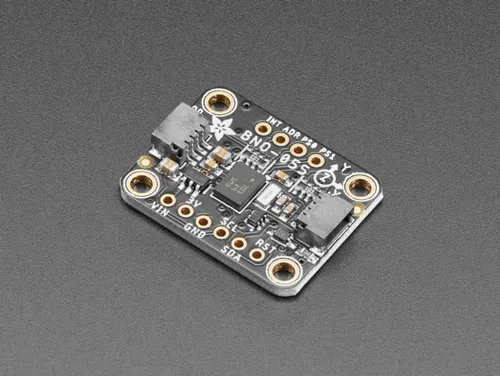
' ' BESCHREIBUNG Wenn Sie jemals einen 9-DOF-Sensor bestellt und verkabelt haben, haben Sie wahrscheinlich auch die Herausforderung erkannt, die Sensordaten von Beschleunigungsmesser, Gyroskop und Magnetometer in eine echte \' '3D-Raumorientierung\' ' umzuwandeln! Die Orientierung ist ein schwer zu lösendes Problem. Die Algorithmen zur Sensorfusion (die geheime Soße, die Beschleunigungsmesser-, Magnetometer- und Gyroskopfdaten zu einer stabilen dreiachsigen Orientierungsausgabe vermischt) können verblüffend schwierig sein, richtig hinzubekommen und auf kostengünstigen Echtzeitsystemen zu implementieren. Bosch ist die erste Firma, die dies richtig hinbekommen hat, indem sie einen MEMS-Beschleunigungsmesser, Magnetometer und Gyroskop mit einem Hochgeschwindigkeitsprozessor auf ARM-Cortex-M0-Basis auf einen einzigen Chip gebracht hat, um alle Sensordaten zu verdauen, die Sensorfusion und Echtzeitanforderungen zu abstrahieren und Daten auszuspucken, die Sie in Quaternionen, Eulerwinkeln oder Vektoren verwenden können. Behalten Sie die Adafruit 9-DOF Absolute Orientierung IMU Fusion Breakout - BNO055 im Stemma QT-Format! Wir haben diesen Ausbruch auch in einer Nicht-Stemma Form und Größe. Die Verwendung ist zwischen den beiden Ausbrüchen identisch : dieselbe Bibliothek und Software funktioniert auf beiden. Die QT-Version ist etwas kleiner und hat Plug-and-Play-IC-Steckverbinder auf beiden Seiten für lötfreie Anwendungen! Anstatt Wochen oder Monate damit zu verbringen, mit Algorithmen unterschiedlicher Genauigkeit und Komplexität herumzuspielen, können Sie dank des BNO055 - einem intelligenten 9-DOF-Sensor, der die Sensorfusion ganz allein erledigt - in wenigen Minuten aussagekräftige Sensordaten erhalten! Sie können die Daten direkt über I2C und Bobs Onkel auslesen. Das BNO055 kann die folgenden Sensordaten ausgeben: Absolute Orientierung (Euler-Vektor, 100Hz) Dreiachsen-Orientierungsdaten basierend auf einer 360°-Kugel Absolute Orientierung (Quatenrion, 100Hz) Vier-Punkt-Quaternionen-Ausgabe für genauere Datenmanipulation Angular Velocity Vector (100Hz) Drei Achsen der 'Rotationsgeschwindigkeit' in rad/s Beschleunigungsvektor (100Hz) Drei Achsen der Beschleunigung (Schwerkraft + lineare Bewegung) in m/s2 Magnetfeldstärke-Vektor (20Hz) Drei Achsen der Magnetfelderfassung in Mikro-Tesla (uT) Linearbeschleunigungsvektor (100Hz) Drei Achsen der linearen Beschleunigungsdaten (Beschleunigung minus Schwerkraft) in m/s2 Gravitationsvektor (100Hz) Drei Achsen der Gravitationsbeschleunigung (abzüglich jeder Bewegung) in m/s2 Temperatur (1Hz) Umgebungstemperatur in Grad Celsius Die Anwendung ist einfach, mit I2C-Unterstützung, die 3 oder 5 Volt logisch sicher ist. Wir brechen auch die Interrupt-Pins und Adresswahl-Jumper heraus, falls Sie zwei BNO-055 auf einem I2C-Bus haben möchten. Wir haben sowohl Arduino (C/C++) als auch CircuitPython-Bibliotheken verfügbar, so dass Sie es mit jedem Mikrocontroller oder jeder Computerplatine verwenden können und Daten in weniger als 5 Minuten auslesen können. Vier Befestigungslöcher sorgen für eine sichere Verbindung. Zusätzlich, da es I2C spricht, können Sie es leicht mit zwei Drähten (plus Strom und Masse!) anschließen. Wir haben sogar SparkFun qwiic-kompatible STEMMA QT Anschlüsse für den I2C-Bus eingebaut, so dass Sie nicht einmal löten müssen! Verwenden Sie ein Plug-and-Play-STEMMA-QT-Kabel, um 9 DoF-Daten so schnell wie möglich zu erhalten. Kommt zusammengebaut und getestet, mit einem kleinen Stück Header. Etwas Lötzinn ist erforderlich, um den Header auf der Breakout-Platine zu befestigen, wenn Sie ihn in einer Lochrasterplatine verwenden wollen, aber das ist ziemlich einfache Arb

35,92 €
zzgl. 4,95 € VersandAdafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055 STEMMA QT Qwiic
' ' BESCHREIBUNG Wenn Sie jemals einen 9-DOF-Sensor bestellt und verkabelt haben, haben Sie wahrscheinlich auch die Herausforderung erkannt, die Sensordaten von Beschleunigungsmesser, Gyroskop und Magnetometer in eine echte \' '3D-Raumorientierung\' ' umzuwandeln! Die Orientierung ist ein schwer zu lösendes Problem. Die Algorithmen zur Sensorfusion (die geheime Soße, die Beschleunigungsmesser-, Magnetometer- und Gyroskopfdaten zu einer stabilen dreiachsigen Orientierungsausgabe vermischt) können verblüffend schwierig sein, richtig hinzubekommen und auf kostengünstigen Echtzeitsystemen zu implementieren. Bosch ist die erste Firma, die dies richtig hinbekommen hat, indem sie einen MEMS-Beschleunigungsmesser, Magnetometer und Gyroskop mit einem Hochgeschwindigkeitsprozessor auf ARM-Cortex-M0-Basis auf einen einzigen Chip gebracht hat, um alle Sensordaten zu verdauen, die Sensorfusion und Echtzeitanforderungen zu abstrahieren und Daten auszuspucken, die Sie in Quaternionen, Eulerwinkeln oder Vektoren verwenden können. Behalten Sie die Adafruit 9-DOF Absolute Orientierung IMU Fusion Breakout - BNO055 im Stemma QT-Format! Wir haben diesen Ausbruch auch in einer Nicht-Stemma Form und Größe. Die Verwendung ist zwischen den beiden Ausbrüchen identisch : dieselbe Bibliothek und Software funktioniert auf beiden. Die QT-Version ist etwas kleiner und hat Plug-and-Play-IC-Steckverbinder auf beiden Seiten für lötfreie Anwendungen! Anstatt Wochen oder Monate damit zu verbringen, mit Algorithmen unterschiedlicher Genauigkeit und Komplexität herumzuspielen, können Sie dank des BNO055 - einem intelligenten 9-DOF-Sensor, der die Sensorfusion ganz allein erledigt - in wenigen Minuten aussagekräftige Sensordaten erhalten! Sie können die Daten direkt über I2C und Bobs Onkel auslesen. Das BNO055 kann die folgenden Sensordaten ausgeben: Absolute Orientierung (Euler-Vektor, 100Hz) Dreiachsen-Orientierungsdaten basierend auf einer 360°-Kugel Absolute Orientierung (Quatenrion, 100Hz) Vier-Punkt-Quaternionen-Ausgabe für genauere Datenmanipulation Angular Velocity Vector (100Hz) Drei Achsen der 'Rotationsgeschwindigkeit' in rad/s Beschleunigungsvektor (100Hz) Drei Achsen der Beschleunigung (Schwerkraft + lineare Bewegung) in m/s2 Magnetfeldstärke-Vektor (20Hz) Drei Achsen der Magnetfelderfassung in Mikro-Tesla (uT) Linearbeschleunigungsvektor (100Hz) Drei Achsen der linearen Beschleunigungsdaten (Beschleunigung minus Schwerkraft) in m/s2 Gravitationsvektor (100Hz) Drei Achsen der Gravitationsbeschleunigung (abzüglich jeder Bewegung) in m/s2 Temperatur (1Hz) Umgebungstemperatur in Grad Celsius Die Anwendung ist einfach, mit I2C-Unterstützung, die 3 oder 5 Volt logisch sicher ist. Wir brechen auch die Interrupt-Pins und Adresswahl-Jumper heraus, falls Sie zwei BNO-055 auf einem I2C-Bus haben möchten. Wir haben sowohl Arduino (C/C++) als auch CircuitPython-Bibliotheken verfügbar, so dass Sie es mit jedem Mikrocontroller oder jeder Computerplatine verwenden können und Daten in weniger als 5 Minuten auslesen können. Vier Befestigungslöcher sorgen für eine sichere Verbindung. Zusätzlich, da es I2C spricht, können Sie es leicht mit zwei Drähten (plus Strom und Masse!) anschließen. Wir haben sogar SparkFun qwiic-kompatible STEMMA QT Anschlüsse für den I2C-Bus eingebaut, so dass Sie nicht einmal löten müssen! Verwenden Sie ein Plug-and-Play-STEMMA-QT-Kabel, um 9 DoF-Daten so schnell wie möglich zu erhalten. Kommt zusammengebaut und getestet, mit einem kleinen Stück Header. Etwas Lötzinn ist erforderlich, um den Header auf der Breakout-Platine zu befestigen, wenn Sie ihn in einer Lochrasterplatine verwenden wollen, aber das ist ziemlich einfache Arb
-

Adafruit STEMMA QT / Qwiic - 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055
Wenn Sie jemals einen 9-DOF-Sensor bestellt und verdrahtet haben, haben Sie wahrscheinlich auch die Herausforderung erkannt, die Sensordaten von Beschleunigungsmesser, Gyroskop und Magnetometer in tatsächliche 3D-Raumorientierung umzuwandeln! Die Orientierung ist ein schwer zu lösendes Problem. Bosch ist das erste Unternehmen, das dieses Problem in den Griff bekommen hat, indem es einen MEMS-Beschleunigungssensor, einen Magnetometer und ein Gyroskop auf einem einzigen Chip zusammen mit einem ARM Cortex-M0-basierten Hochgeschwindigkeitsprozessor untergebracht hat, der alle Sensordaten verdaut, die Sensorfusion und die Echtzeitanforderungen abstrahiert und Daten ausspuckt, die Sie in Quaternionen, Euler-Winkeln oder Vektoren verwenden können. Anstatt sich wochen- oder monatelang mit Algorithmen unterschiedlicher Genauigkeit und Komplexität herumzuschlagen, können Sie mit dem BNO055 in wenigen Minuten aussagekräftige Sensordaten erhalten - ein intelligenter 9-DOF-Sensor, der die Sensorfusion ganz alleine durchführt! Sie können die Daten direkt über I2C auslesen, und fertig. Der BNO055 kann die folgenden Sensordaten ausgeben: Absolute Orientierung (Euler-Vektor, 100Hz) Dreiachsige Orientierungsdaten basierend auf einer 360° KugelAbsolute Orientierung (Quatenrion, 100Hz) Vierpunkt-Quaternion-Ausgabe für genauere DatenmanipulationAngular Velocity Vector (100Hz) Drei Achsen der 'Rotationsgeschwindigkeit' in rad/sBeschleunigungsvektor(100Hz) Drei Achsen der Beschleunigung (Schwerkraft + lineare Bewegung) in m/s^2Magnetfeldstärkevektor (20Hz) Drei Achsen der Magnetfeldabtastung in Mikro-Tesla (uT)Linearer Beschleunigungsvektor (100Hz) Drei Achsen der linearen Beschleunigungsdaten (Beschleunigung minus Schwerkraft) in m/s^2Gravitationsvektor (100Hz) Drei Achsen der Gravitationsbeschleunigung (abzüglich einer Bewegung) in m/s^2Temperatur (1Hz) Umgebungstemperatur in Grad Celsius Praktisch, oder? Also haben wir diesen sehr schönen Sensor auf ein eigenes Breakout gesetzt, komplett mit 3,3V-Regler, Logik-Level-Shifting für die Reset- und I2C-Pins, einem externen 32,768KHz-Quarz (empfohlen für beste Performance) und Breakouts für einige andere Pins, die Sie vielleicht praktisch finden. Wird montiert und getestet geliefert, mit einem kleinen Stück Header. Einige Lötarbeiten sind erforderlich, um den Header mit der Breakout-Platine zu verbinden, aber es ist ziemlich einfache Arbeit. Das Beste ist, Sie können in 10 Minuten mit unserem praktischen Tutorial über den Zusammenbau, die Verdrahtung, die CircuitPython & Arduino-Bibliotheken und die grafische Processing-Oberfläche und mehr loslegen! - Sensoren vor Feuchtigkeit, extremen Temperaturen und direkter Sonneneinstrahlung schützen. - Statische Aufladung durch geeignete Maßnahmen vermeiden, um Schäden an elektronischen Bauteilen zu verhindern. - Nur mit den empfohlenen Spannungen und Anschlüssen betreiben, um Kurzschlüsse oder Überhitzung zu vermeiden. - Kein Zerlegen, Modifizieren oder gewaltsames Öffnen des Produkts. - Von kleinen Kindern fernhalten; enthält Kleinteile, die verschluckt werden könnten. - Nicht in explosionsgefährdeten Umgebungen oder in der Nähe von entflammbaren Materialien verwenden. - e oder beschädigte Sensoren/Module nicht mehr im Betrieb einsetzen. - Entsorgung gemäß lokalen Vorschriften für elektronische Abfälle durchführen. - Wiederverwendbare Bauteile vor der Entsorgung sorgfältig prüfen.

39,54 €
zzgl. 4,95 € VersandAdafruit STEMMA QT / Qwiic - 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055
Wenn Sie jemals einen 9-DOF-Sensor bestellt und verdrahtet haben, haben Sie wahrscheinlich auch die Herausforderung erkannt, die Sensordaten von Beschleunigungsmesser, Gyroskop und Magnetometer in tatsächliche 3D-Raumorientierung umzuwandeln! Die Orientierung ist ein schwer zu lösendes Problem. Bosch ist das erste Unternehmen, das dieses Problem in den Griff bekommen hat, indem es einen MEMS-Beschleunigungssensor, einen Magnetometer und ein Gyroskop auf einem einzigen Chip zusammen mit einem ARM Cortex-M0-basierten Hochgeschwindigkeitsprozessor untergebracht hat, der alle Sensordaten verdaut, die Sensorfusion und die Echtzeitanforderungen abstrahiert und Daten ausspuckt, die Sie in Quaternionen, Euler-Winkeln oder Vektoren verwenden können. Anstatt sich wochen- oder monatelang mit Algorithmen unterschiedlicher Genauigkeit und Komplexität herumzuschlagen, können Sie mit dem BNO055 in wenigen Minuten aussagekräftige Sensordaten erhalten - ein intelligenter 9-DOF-Sensor, der die Sensorfusion ganz alleine durchführt! Sie können die Daten direkt über I2C auslesen, und fertig. Der BNO055 kann die folgenden Sensordaten ausgeben: Absolute Orientierung (Euler-Vektor, 100Hz) Dreiachsige Orientierungsdaten basierend auf einer 360° KugelAbsolute Orientierung (Quatenrion, 100Hz) Vierpunkt-Quaternion-Ausgabe für genauere DatenmanipulationAngular Velocity Vector (100Hz) Drei Achsen der 'Rotationsgeschwindigkeit' in rad/sBeschleunigungsvektor(100Hz) Drei Achsen der Beschleunigung (Schwerkraft + lineare Bewegung) in m/s^2Magnetfeldstärkevektor (20Hz) Drei Achsen der Magnetfeldabtastung in Mikro-Tesla (uT)Linearer Beschleunigungsvektor (100Hz) Drei Achsen der linearen Beschleunigungsdaten (Beschleunigung minus Schwerkraft) in m/s^2Gravitationsvektor (100Hz) Drei Achsen der Gravitationsbeschleunigung (abzüglich einer Bewegung) in m/s^2Temperatur (1Hz) Umgebungstemperatur in Grad Celsius Praktisch, oder? Also haben wir diesen sehr schönen Sensor auf ein eigenes Breakout gesetzt, komplett mit 3,3V-Regler, Logik-Level-Shifting für die Reset- und I2C-Pins, einem externen 32,768KHz-Quarz (empfohlen für beste Performance) und Breakouts für einige andere Pins, die Sie vielleicht praktisch finden. Wird montiert und getestet geliefert, mit einem kleinen Stück Header. Einige Lötarbeiten sind erforderlich, um den Header mit der Breakout-Platine zu verbinden, aber es ist ziemlich einfache Arbeit. Das Beste ist, Sie können in 10 Minuten mit unserem praktischen Tutorial über den Zusammenbau, die Verdrahtung, die CircuitPython & Arduino-Bibliotheken und die grafische Processing-Oberfläche und mehr loslegen! - Sensoren vor Feuchtigkeit, extremen Temperaturen und direkter Sonneneinstrahlung schützen. - Statische Aufladung durch geeignete Maßnahmen vermeiden, um Schäden an elektronischen Bauteilen zu verhindern. - Nur mit den empfohlenen Spannungen und Anschlüssen betreiben, um Kurzschlüsse oder Überhitzung zu vermeiden. - Kein Zerlegen, Modifizieren oder gewaltsames Öffnen des Produkts. - Von kleinen Kindern fernhalten; enthält Kleinteile, die verschluckt werden könnten. - Nicht in explosionsgefährdeten Umgebungen oder in der Nähe von entflammbaren Materialien verwenden. - e oder beschädigte Sensoren/Module nicht mehr im Betrieb einsetzen. - Entsorgung gemäß lokalen Vorschriften für elektronische Abfälle durchführen. - Wiederverwendbare Bauteile vor der Entsorgung sorgfältig prüfen.
-

Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055
Produktart: Modul

40,50 €
zzgl. 4,95 € VersandAdafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055
Produktart: Modul


Gut zu wissen
Ähnliche Produkte

Pimoroni Sensor ICM20948 9DoF Bewegungs Sensor Breakout
25,20 €
Amazon.de

Ruuvi Bluetooth-Sensori 4in1 - Temperatur, Feuchtigkeit, Luftdruck und Bewegung - Solarenergie-Zubehör mit robustem Design, kabelloser Echtzeitüberwachung und einem breiten Betriebstemperaturbereich von -40°C bis +85°C.
41,59 €
Amazon.de

ELV LoRaWAN® Erschütterungssensor Outdoor, LW-OMO
39,95 €
Amazon.de
ICM-20948 v2 Modul, 3-Achsen-Accelerometer, -Gyroskop, -Magnetometer 3.3-5V 9DOF
17,25 €
Amazon.de

Hipzeepo VR IMU Breakout - BNO086 (Qwiic) Dreiachsiger Beschleunigungsmesser/Gyroskop/Magnetometer
32,44 €
Amazon.de

DFRobot SEN0291 Sensor: Gravity, I2C, 3,3-5VDC, 1mA, ±0,5 mGal, Strommessung, Bewegungs-/Neigungsdetektion, industriell
15,90 €
Amazon.de

SparkFun Qwiic - Atmospheric Sensor Breakout, BME280
17,75 €
Amazon.de